STANDARD DE FRÉQUENCE 10 MHz SYNCHRONISÉ PAR GPS

Ce montage est destiné ŕ produire un signal rectangulaire de 10 MHz largement plus précis et stable qu'un oscillateur ŕ quartz du genre TCXO.
Le cśur du montage est un module de réception GPS de référence JUPITER TU30 - D140 qui était utilisé comme standard de temps dans des réseaux de télécommunications (actuellement, il semble que NAVMAN commercialise un JUPITER TU60 - D120 offrant les męmes caractéristiques).
On le trouve (pour combien de temps encore ?) sur eBay comme matériel d'occasion et il a la particularité d'avoir une sortie 1 Hz et surtout une sortie 10 kHz qui va ętre utilisée ici. Il faudra lui adjoindre une antenne active déportée avec un connecteur OSX subminiature. Ce type d'antenne se trouve aisément sur eBay.
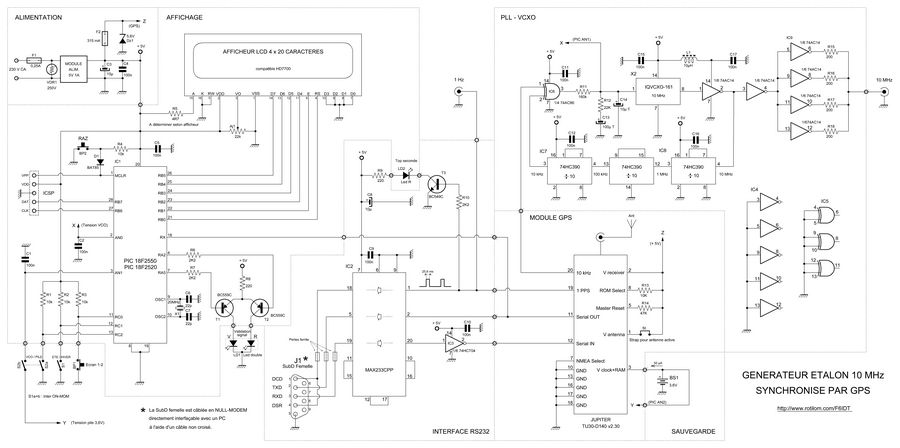
Comme nous désirons avoir une fréquence de 10 MHz, nous allons utiliser un oscillateur ŕ quartz asservi en tension (VCXO) par un classique Phase Lock Loop (Boucle ŕ verrouillage de phase).
Un diviseur par 1000 attaque un comparateur de phase (porte OU exclusif) qui génčre une tension continue destinée ŕ corriger la fréquence en sortie du TCXO. La sortie sur connecteur BNC se fait sous 50 ohms environ grâce ŕ quatre portes en parallčle.
La sortie 1 Hz (une impulsion de 27 ms toutes les secondes) est disponible en face avant sur un connecteur BNC. Ce signal attaque également un transistor pour la visualisation par LED. Par l'intermédiaire d'un convertisseur TTL/RS232 elle se retrouve ŕ ce standard sur les broches DCD et DSR du connecteur Sub-D femelle 9 broches. Contrairement ŕ la plupart des modules GPS, le clignotement de la LED au rythme de la seconde n'indique en rien l'obtention de trames NMEA valides.
Le module GPS est doté d'une sortie du signal NMEA-0183 (4800 bps, pas de parité, 8 bits de data, 1 bit de stop). Ce signal TTL attaque directement le PIC mais est également mis au niveau RS232 par un convertisseur MAX233 qui ne nécessite pas de condensateurs extérieurs pour les pompes de charge. Ceci pour le rendre compatible avec l'entrée RS232 d'un PC.
Pour
exploiter les informations délivrées par le GPS, on peut utiliser
un programme sur PC, par exemple VisualGPS en freeware
: (http://www.visualgps.net/VisualGPS/default.htm
).
Signalons également un ensemble de programmes
moins "graphiques" mais tout aussi performants et gratuits de
gestion des signaux GPS dont la possibilité de simuler un récepteur
GPS en émettant des trames sur le port série : (http://homepage2.nifty.com/k8/gps/index.htm).
Une pile lithium de 3,6 V (consommation env. 50 µA) assure la sauvegarde des données pour permettre un redémarrage plus rapide. Cette tension peut ętre affichée par le LCD.
Un microcontrôleur
PIC 18F2550 (ou 18F2520) est prévu pour décoder le signal et afficher les informations
sur un module LCD 4 x 20 caractčres. A noter que le 18F2550 est
compatible avec ce montage car il n'utilise pas la broche RC3, absente
sur ce PIC. Il suffira de charger le fichier HEX correspondant.
Par le décodage de la trame
GSA, l'information 3D fix permet de faire passer la LED bicolore
du rouge au vert et ainsi d'indiquer le calage du GPS et la sortie
10 MHz avec la précision maximum (1 x 10-11).
La trame utilisée
pour la visualisation du "fix"
est de la forme $GPRMC,HHMMSS,A,DEGMIN, etc. La lettre A indique que le GPS reçoit une information
3D (au moins 4 satellites reçus) et la LED est verte. Si cette lettre
est V cela signifie que le GPS ne reçoit pas de trames valides et la diode est rouge.
En
dehors de cette information, cette trame permet de connaître l'heure,
la latitude, la longitude, la vitesse et la date.
L'autre trame GGA contient le nombre de satellites utilisés, la dilution de précision (HDOP) et l'altitude.
Une remarque ŕ faire cependant au niveau des données NMEA et en particulier la trame RMC. Selon le GPS utilisé, les données précédentes peuvent avoir plus ou moins de décimales et donc entraîner un décalage si le décodage se fait par comptage des positions dans la trame. Ce qui veut dire qu'un programme élaboré avec cette méthode (comme dans notre cas) ne sera pas forcément compatible avec tous les GPS.
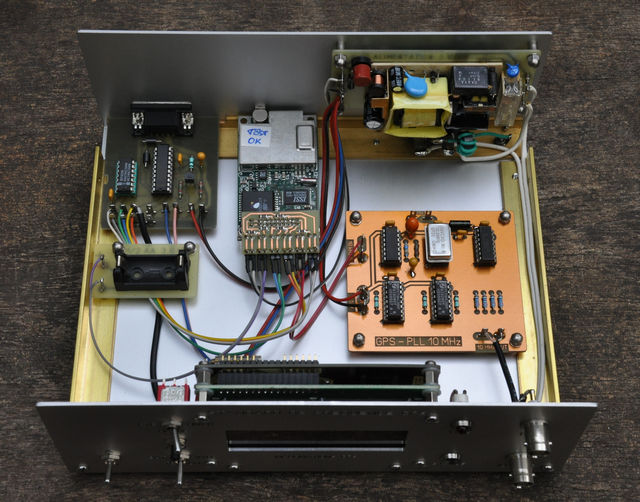
RÉALISATION :
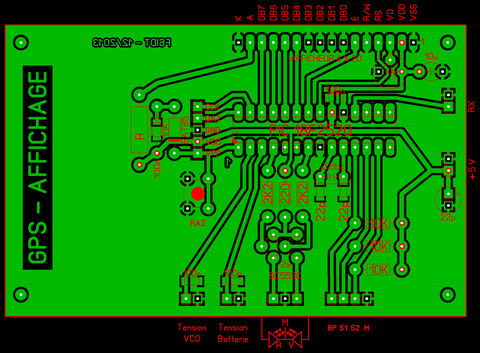
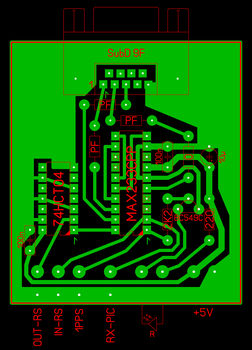
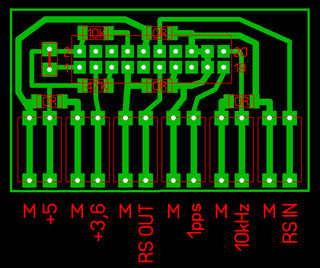
Platine affichage Interface RS232 - TTL
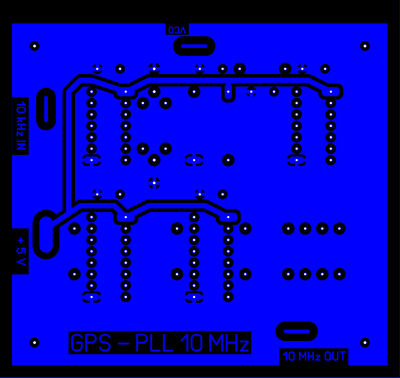
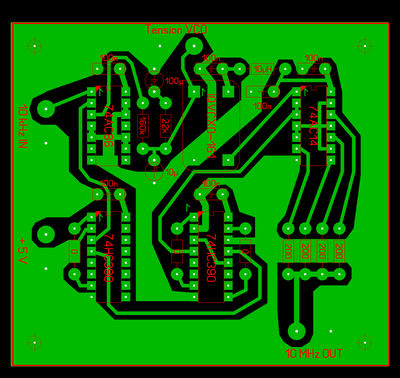
Platine
PLL
Le module GPS est doté d'un connecteur un peu particulier avec un pas de 2 mm. On peut trouver les embases femelles correspondantes chez Farnell ou chez Reichelt. Il sera nécessaire de faire un petit circuit imprimé supportant ce connecteur et permettant de le relier aux autres cartes.
PROGRAMMATION DU PIC:
Au démarrage :
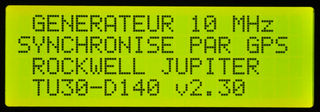
Les informations sont affichées sur le LCD en deux écrans sélectionnables par un bouton poussoir :


NOTE IMPORTANTE : Le programme est compatible avec les trames du récepteur JUPITER décrit ci-dessus. Une tentative de décodage avec un récepteur d'une autre marque pourrait donner des résultats imprévisibles.
Deux fichiers HEX sont disponibles pour programmer le PIC :
-
Avec un 18F2520 (gps2520.hex) : ![]()
-
Avec un 18F2550 (gps2550.hex) : ![]()
RESSOURCE UTILISÉE :
- Le site de G3RUH pour la partie PLL-VCO