RÉALISATION D'UNE TÊTE PANORAMIQUE AUTOMATIQUE
BUT : Effectuer une série de prise de vue d'une manière entièrement automatique avec les moyens les plus simples possibles. La partie mécanique nécessitera un tour et du matériel classique et la partie électronique, la réalisation de circuits imprimés.
Remarque concernant les schémas
et circuits imprimés : Nous avons adopté depuis longtemps les logiciels
Splan pour les schémas et Sprint Layout pour les circuits. Ces deux
logiciels sont payants, mais remarquables de simplicité et de facilité
d'utilisation. Ils sont téléchargeables en version complète
limitée (pas de sauvegarde ni d'impression) sur le site de leurs
concepteurs : http://www.abacom-online.de.
A signaler sur ce même site, un programme gratuit à télécharger
est mis à disposition pour visualiser et imprimer les fichiers.
PRINCIPE : C'est l'association
d'un entraînement mécanique par moteur pas à pas et un
intervallomètre électronique. La commande du déclencheur de l'appareil
photo se fait par fil ou par liaison radio (ce qui peut permettre
de faire des photos à distance) et nécessite un appareil muni d'une
prise adéquate (reflex CANON ou NIKON par exemple). Dans le
cas d'un compact qui ne dispose pas d'une telle prise, on pourrait
imaginer un système électromécanique placé sur le bouton du déclencheur.
L'appareil
est fixé sur une tête rotative entraînée par le moteur au moyen
d'une courroie crantée. Après un certain angle de rotation, le moteur
s'arrête et le circuit électronique envoie un premier signal pour
la mise au point (équivalent à la première moitié de la course du
bouton sur l'appareil) puis un deuxième qui entraîne la prise de
vue. Aussitôt l'appareil tourne d'un certain angle et le cycle recommence
jusqu'à ce que le système soit arrêté manuellement ou automatiquement
(version commande digitale).
La vitesse
de rotation étant constante, on agit sur le temps entre deux prises
pour faire varier l'angle de manière à avoir un recouvrement du
champ de chaque photo (30 % environ).
Note : Sans utiliser la t^te
rotative, l'intervallomètre seul
peut servir à faire une suite de photos qu'il est possible d'animer
pour en faire une séquence vidéo simulant un film en accéléré. On
peut ainsi suivre l'éclosion d'une fleur, la pousse d'une plante,
la construction d'un bâtiment, etc. L'intervallomètre et le logiciel
gratuit Virtual Dub permettent de faire tout cela et c'est ce que
nous verrons dans un autre chapitre avec un dispositif simplifié.
PARTIE ÉLECTRONIQUE :
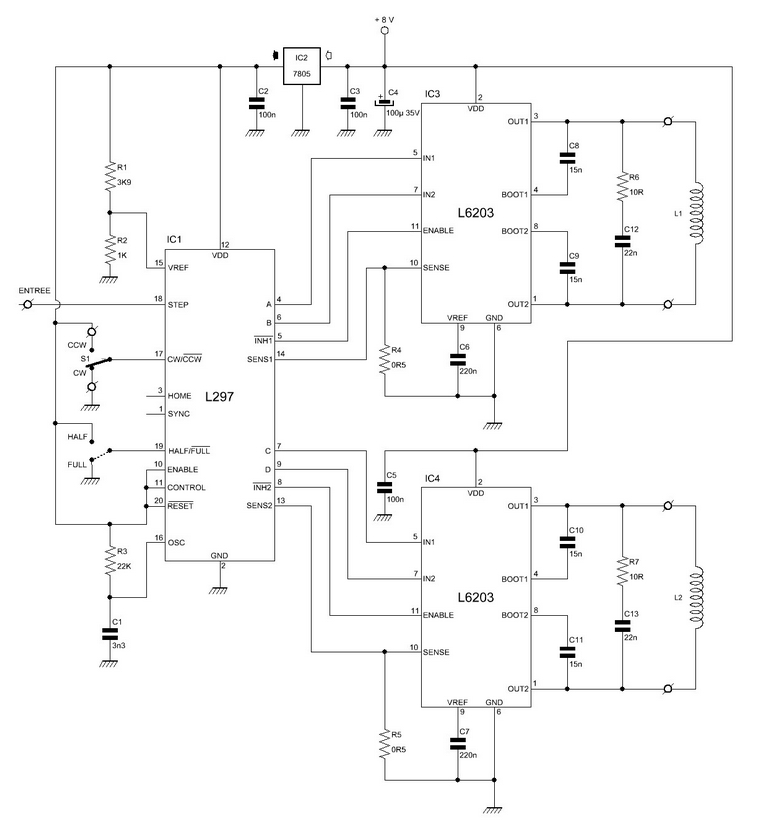
1-1 COMMANDE DU MOTEUR PAS À PAS
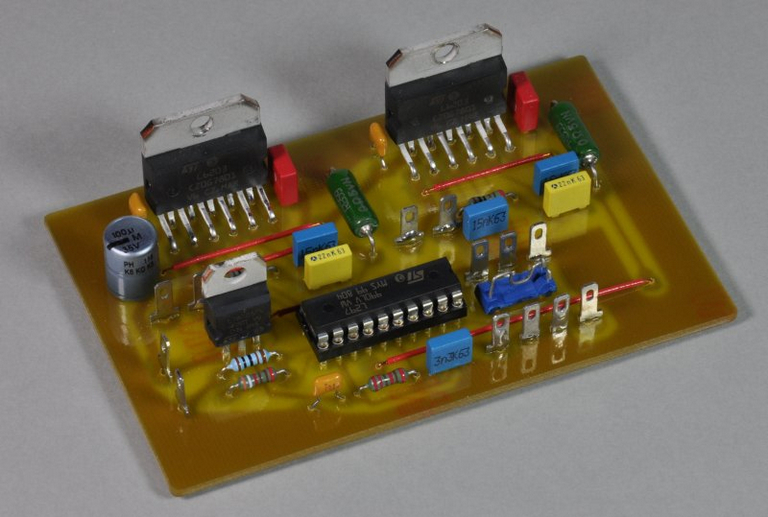
Nous utilisons un moteur bipolaire (4 fils) de 200 pas par tour, tension 8 V avec une carcasse de 42 x 4 mm et axe diamètre 5mm. Pour des raisons de simplicité, la commande de ce moteur se fait par deux étages de puissance intégrés L6203 (ST Microelectronics) et un circuit de contrôle L297 (ST Microelectronics).
SCHÉMA
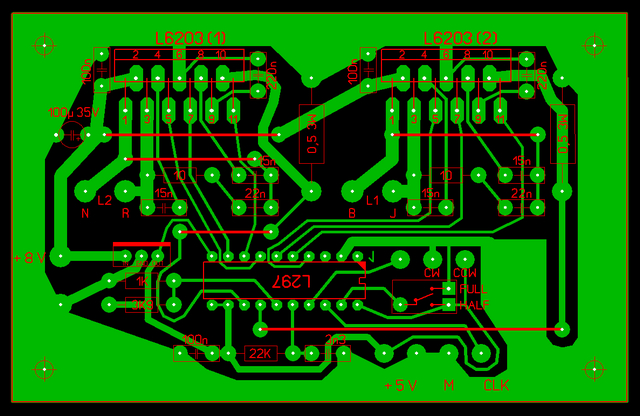
CIRCUIT
IMPRIMÉ
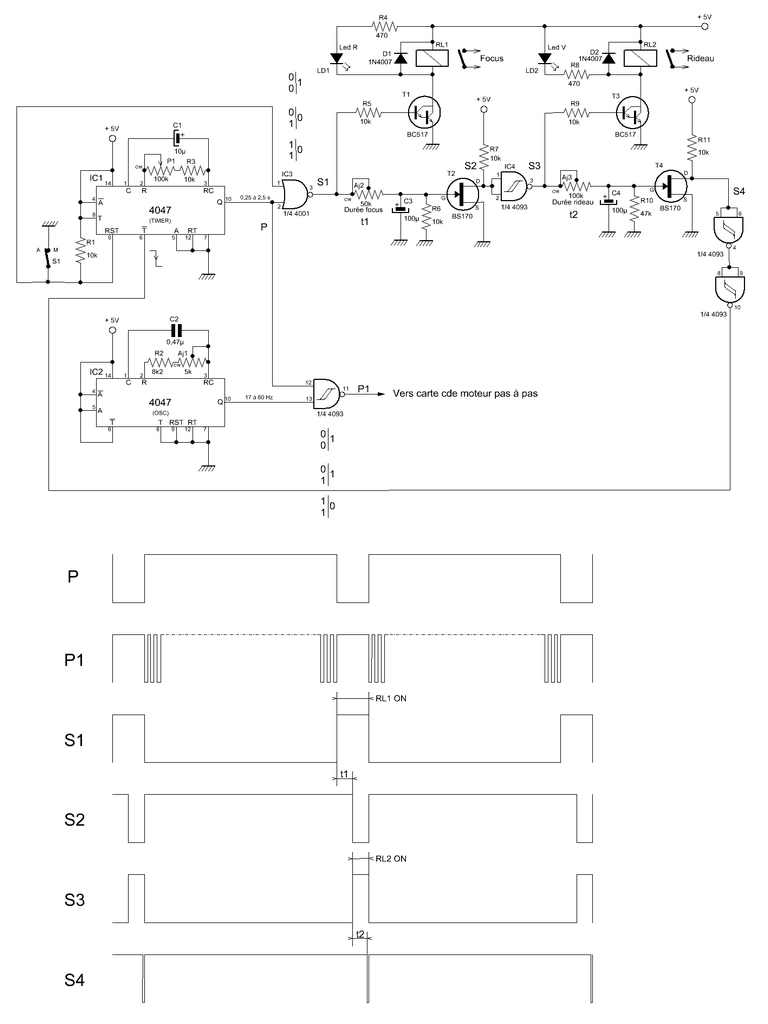
1-2 INTERVALLOMÈTRE :
1-2-1
VERSION ANALOGIQUE
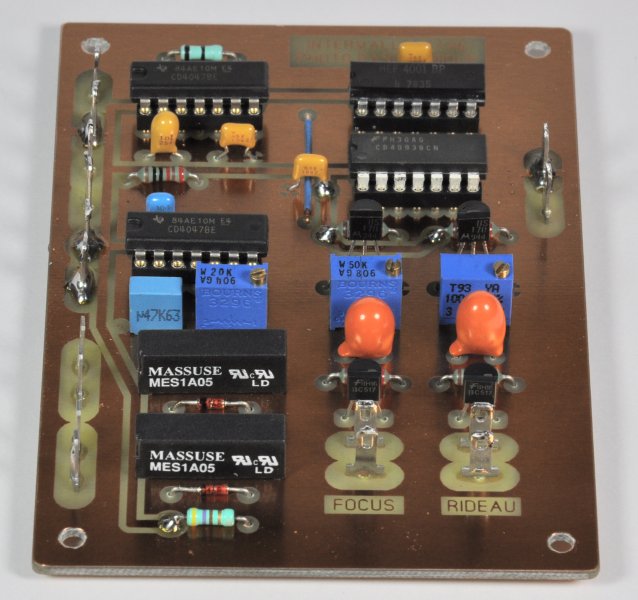
L'oscillateur astable IC2 génère un signal
carré de fréquence ajustable qui attaque le circuit du moteur pas
à pas à travers une porte NAND. Cette porte laisse passer les impulsions
pendant une période déterminée (réglable par potentiomètre) par
le monostable IC1. Dans le même temps, IC1 attaque successivement
deux générateurs de délai destinés à commander la mise au point
de l'appareil (Rel1) et la prise de vue (Rl2). Quand cette séquence
est terminée, une impulsion T4 redéclanche IC1 pour un nouveau cycle.
S1 permet le démarrage et l'arrêt de la séquence.
Les
contacts des relais sont à câbler directement à la prise correspondante de l'appareil
photo ou bien, comme ici, à un circuit de télécommande sans fil. Dans le cas d'un appareil à prise propriétaire comme le D90
de NIKON, il faut acheter une télécommande filaire MC-DC2, couper
le cordon et faire un raccordement par jack. Ceci permet d'avoir
une commande à distance polyvalente.
SCHÉMA
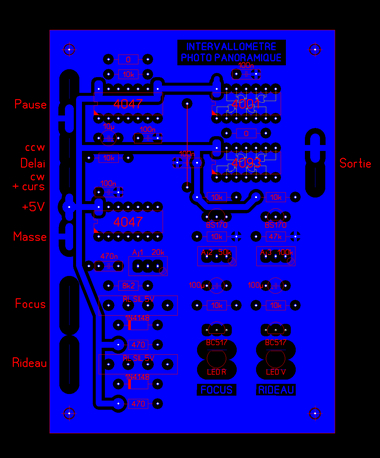
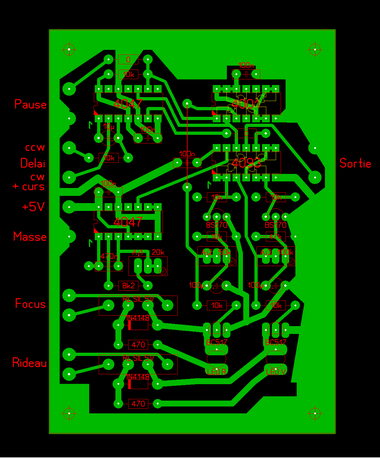
CIRCUIT
IMPRIMÉ
double face (en bleu côté composants,
en vert
côté cuivre par transparence) :
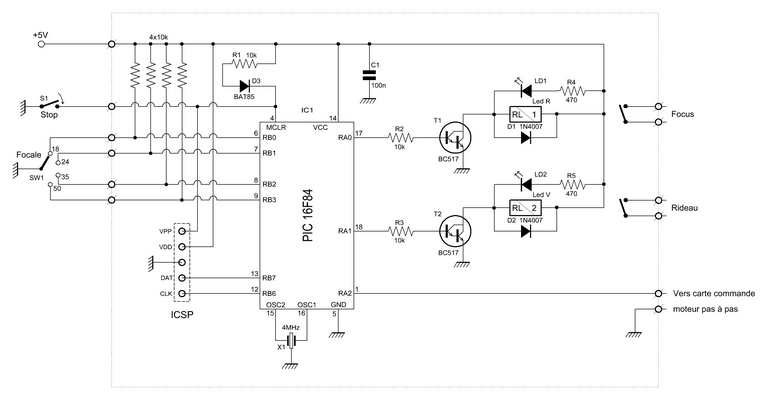
1-2-2 VERSION DIGITALE (PIC)
Cette version fait appel à un PIC16F84A
cadencé à 4 MHz avec un résonateur céramique dont la précision est
largement
suffisante dans cette application.
Un commutateur à 4 positions permet le
choix de la focale et le bouton STOP commande la remise à
zéro du PIC (MCLR).
Le PIC est programmé pour arrêter automatiquement
les prises de vue après une rotation de 360°.
Le fichier
HEX fourni est adapté au NIKON D90. Dans le cas d'un autre appareil,
il faudra certainement modifier les valeurs d'angle de rotation
et le nombre de prises de vue.
Dans ce cas, sur demande, nous
donnerons le fichier source à modifier et à compiler avec le Basic
de MIKROELEKTRONIKA
SCHÉMA
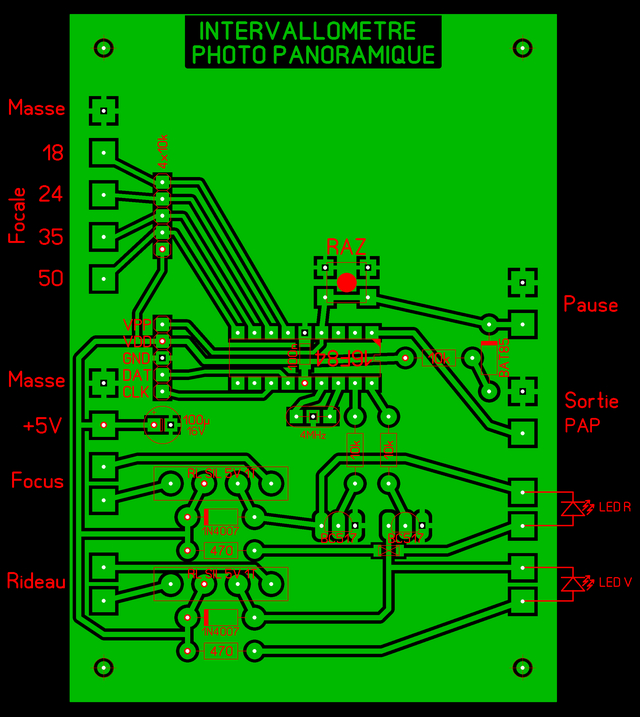
CIRCUIT IMPRIMÉ
Fichier HEX à télécharger : ![]()
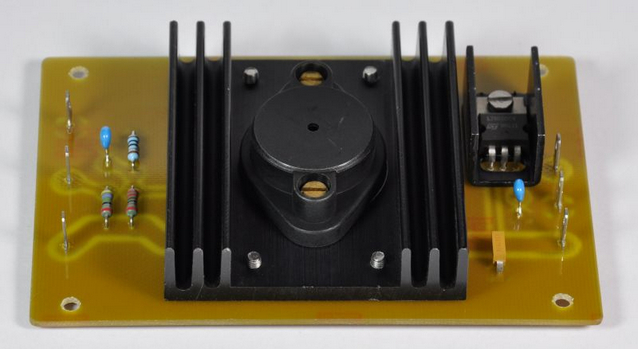
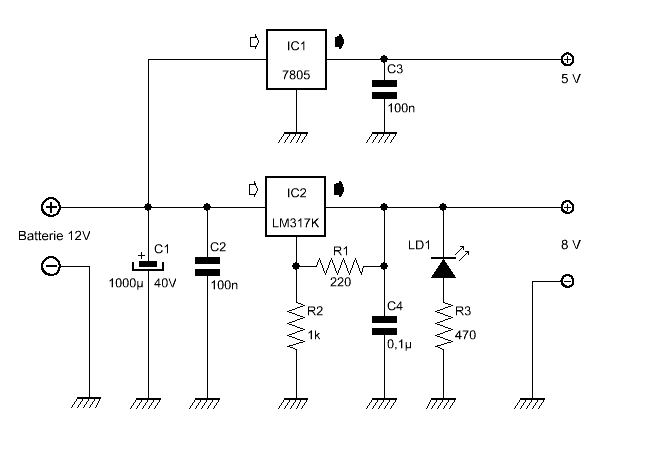
1-3 ALIMENTATION :
L'alimentation fournit à partir du 12 volts de la batterie (3,5 A/h au plomb à électrolyte gélifiée) les tensions de 5 volts pour l'intervallomètre et 8 volts pour le moteur pas à pas. Ce dernier consommant une intensité non négligeable (1,3 A) mais de courte durée, il a été quand même prévu un radiateur sur le LM317.
SCHÉMA
CIRCUIT IMPRIMÉ
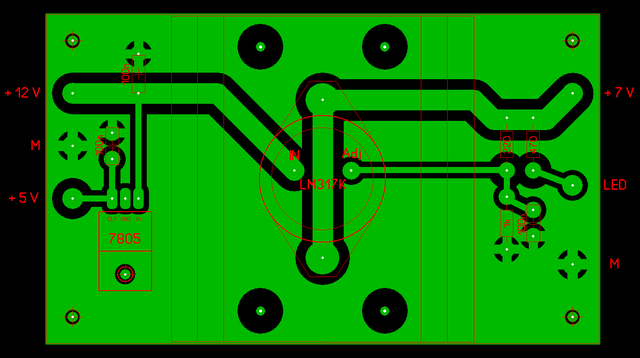
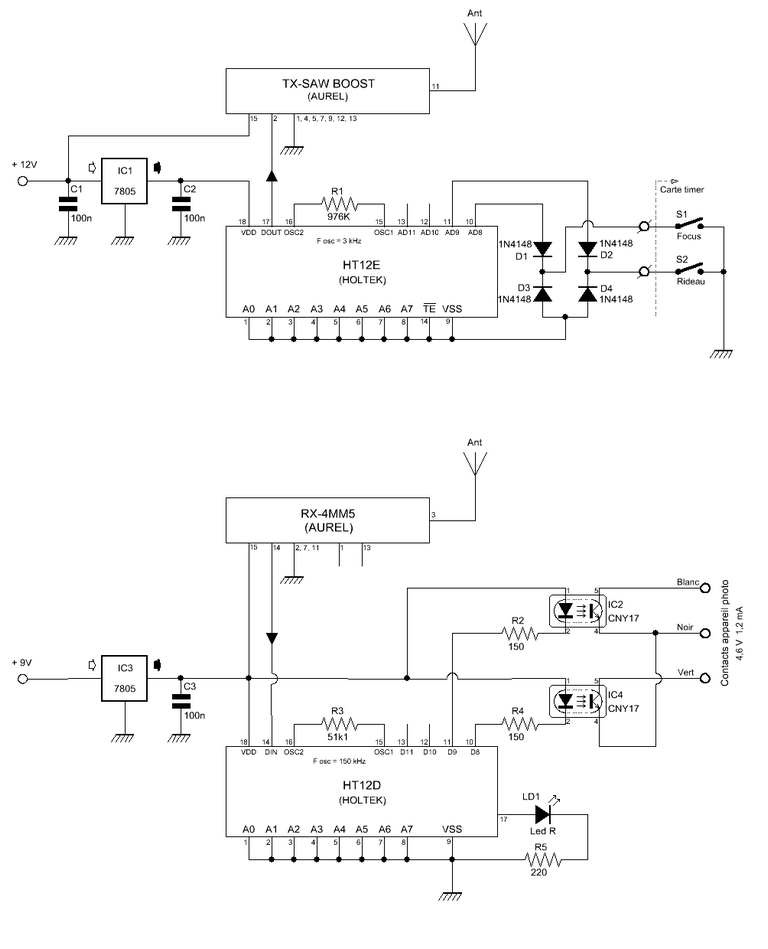
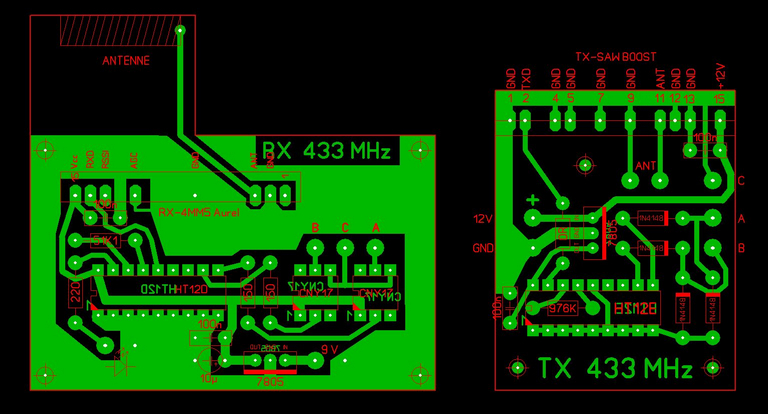
1-4 TÉLÉCOMMANDE SANS FIL :
1-4-1 ÉMETTEUR :
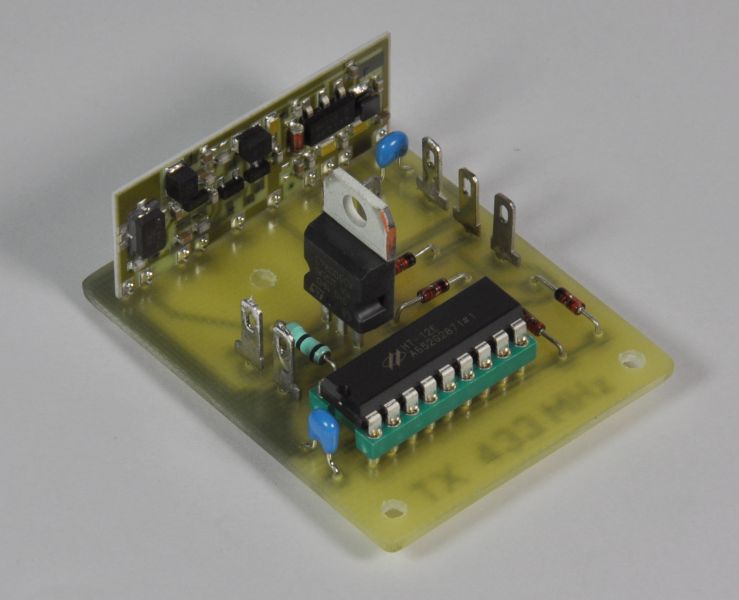
1-4-2 RÉCEPTEUR :
SCHÉMA
CIRCUITS IMPRIMÉS
PARTIE MÉCANIQUE :
Nous avons ajouté un amortisseur de vibration constitué par quatre patins en feutre qui frottent sur la platine de fixation.
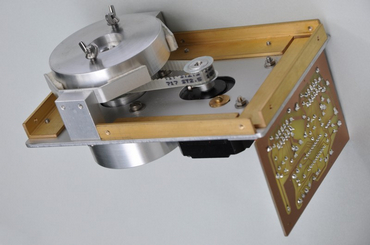

Cliquez ICI pour le plan mécanique.
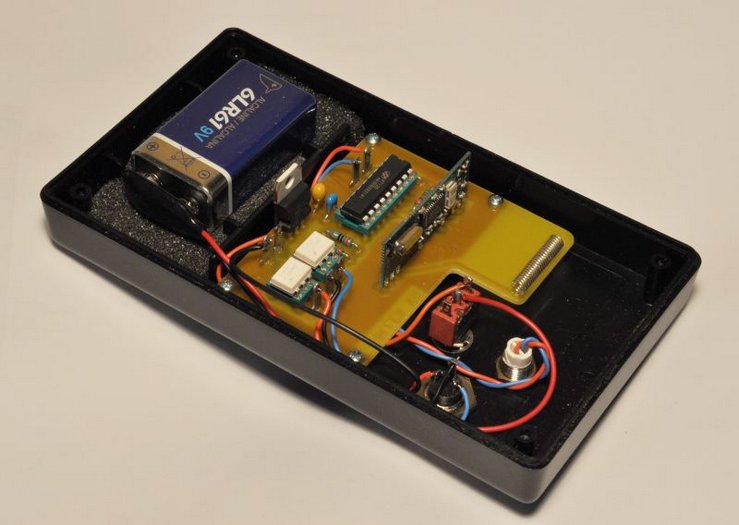
Le coffret de commande incluant la batterie 12 volts :

Cette tête panoramique est utilisée avec un NIKON D90 et objectif
AF-S NIKKOR 18 - 105.
Pour ceux qui ont la chance d'utiliser
cet appareil, voici les données le concernant.
Compte tenu d'un recouvrement d'environ 30% entre chaque photo et d'une focale maximum raisonnable de 50 (75 en 24x36), nous avons le tableau suivant :
|
Focale |
Focale équival. 24x36 |
Nbre photos par tour |
Point nodal (par rapport à la fixation) |
|
18 |
28 |
12 |
97 mm |
|
24 |
35 |
16 |
91 mm |
|
35 |
50 |
22 |
87 mm |
|
50 |
75 |
32 |
72 mm |
A noter que la distance entre l'axe de l'objectif et la semelle de l'appareil est de 42 mm.
C'est inutile de prendre les clichés en résolution maximum.
Cela n'apporte rien au résultat final, sinon d'allonger considérablement
le temps de traitement du logiciel. Nous avons adopté le JPEG FINE
et S (2144x1424) pour la taille.
A cause du risque de bougé lors
de la prise de vue (un moteur pas à pas, c'est un peu brutal...)
nous mettons sur ON la temporisation miroir levé (1 s).
Pour ceux qui ont un autre type d'appareil, ils devront déterminer le point nodal pour chaque focale et le nombre de prises de vue pour un panorama de 360° avec recouvrement de 30%, toujours pour chaque focale. Ce dernier paramètre a été effectué expérimentalement avec une boussole pour connaître l'angle représentant ce recouvrement.
PROJET TERMINÉ ET OPÉRATIONNEL :

La critique principale que l'on pourrait formuler après avoir finalisé cette réalisation est le manque de rigidité du au pied (pas du matériel pro !) à l'empilement mécanique et à la cornière en tôle alu de 2 mm supportant l'appareil. Cela oblige à employer des temporisations avant l'ouverture du rideau. Mais en dehors de ça, les résultats sont magnifiques.
A signaler pour ceux que le bricolage rebute mais qui sont prêts à débourser 300 $ (logiciel compris), qu'une version commerciale et plus sophistiquée existe dans le commerce. A voir sur : http://www.gigapansystems.com
page d'accueil
page 1 "Principe
et Technique"
page 2 "La
Tête Panoramique"
page 3 "Mise
en place"
page 4 "Logiciels
et Visualisation"
page 6 "Séquence animée à partir
d'images fixes"